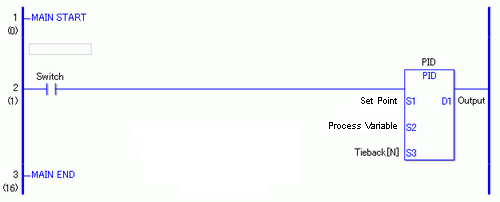
When the PID instruction is enabled, the PID is calculated and the operation volume is adjusted and output (calculated). When the instruction is disabled as below, it outputs the Tieback value. The Tieback value is specified in S3. Input the constant 0 if no output is necessary when the instruction is disabled.
To use the PID instruction in a logic program, allocate variables to the PID variable operand (HP) and the integer variable operands (S1, S2, S3 and D1) first.
PID Variable
When you allocate a variable to the PID instruction operand HP, a member is automatically allocated to the variable.
|
PID Variable |
Variables Settings |
Description |
|---|---|---|
|
VariableName.Q |
Bit Variable |
Completion Flag for PID Instruction Processing |
|
VariableName.PF |
Bit Variable |
Processing Deadband Range Flag |
|
VariableName.UO |
Bit Variable |
Output Values over the Lower Limit |
|
VariableName.TO |
Bit Variable |
Output Values over the Upper Limit |
|
VariableName.IF |
Bit Variable |
Integral Setting |
|
VariableName.KP |
Integer Variable |
Proportional Constant |
|
VariableName.TR |
Integer Variable |
Integral Calculus Time |
|
VariableName.TD |
Integer Variable |
Differential Calculus Time |
|
VariableName.PA |
Integer Variable |
Processing Deadband Range |
|
VariableName.BA |
Integer Variable |
Bias (Offset) |
|
VariableName.ST |
Integer Variable |
Frequency in Sampling |
Values assigned to a proportional constant, integral calculus time, and differential calculus time look different when input in "PID Monitor" from when input to each of the PID variables in a program. When inputting the values in the program, multiply the values by 1000 for the proportional constant, the integral calculus times and the differential calculus times.
For example, proportional constant 0.1 x 1000 -> 100
![]()
All the PID variables are keep-type variables. Up to 8 PID instructions are allowed per project.
1 PID instruction can be specified for 1 PID variable.