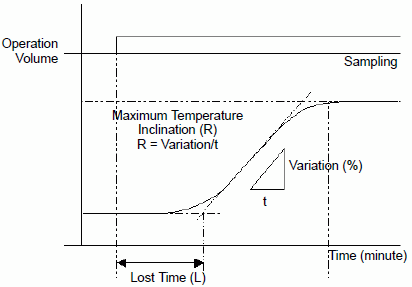
The following explanation uses temperature control as an example. To optimize the result of the PID control, you need to optimize the constant values of P (proportional element), I (Integral element), and D (differential element). You can use the step-response method to derive a PID temperature constant for various setpoints. Note that the value might not be optimized depending on the use and the setpoint. In that case, perform online monitoring and adjust the value in the PID monitor window. Specify the setpoint value for the step-response method and output 100% of the operation volume onto the control target step. At this time, measure the maximum temperature inclination (R) and lost time (L) in the temperature graph shown below.
Insert the measured values for maximum temperature slope (R) and lost time (L) in the following formula to calculate the proportional constant, integral calculus time, and differential calculus time constants. Assign the calculated values to the values in the PID monitor window.
"Proportional Constant" = 100/(0.83 x R x L) [%]
"Integral calculus time" = "Occurrences"*1= 1/(2 x L) [events/minimum]
"Differential Calculus Time" = 0.5 x L [minimum]
*1 When the "Integral calculus time" in relation to the internal operation = "Occurrences".