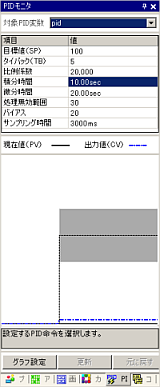
モニタステップに移行すると、ロジック画面で使用されているPID命令の各値の動作がグラフで確認できます。各パラメータの変更もできます。
対象PID変数
モニタするPID変数を選択します。
PID調整項目一覧
グラフを参照しながら値を入力してPID調整ができます。
グラフ表示
PID命令の各値がグラフ表示され、モニタできます。
グラフ設定
表示するグラフの詳細を設定できます。クリックすると、設定ダイアログボックスが表示されます。

表示項目
[現在値]、[目標値]、[出力値]、[出力無効範囲]、[出力範囲]の内、表示する項目にチェックを入れます。
グラフ表示範囲
グラフ表示する範囲の[上限値]、[下限値]、[表示幅]を設定します。
更新
PID調整項目に設定した値で強制的にグラフを更新します。
元に戻す
PID調整項目で値を入力する前の状態に戻します。
PID調整項目
項目 |
値 |
目標値(SP) |
目標値を設定します。出力最小値~出力最大値を入力します。入力範囲は、PID命令の出力設定に依存します。詳細はPID命令を参照してください。 |
タイバック(TB) |
非導通時に出力する値を設定します。入力範囲は、PID命令の出力設定に依存します。詳細はPID命令を参照してください。 |
比例係数 |
比例制御を行うときの傾きを設定します。値が大きいほど目標値に早く達します。値が小さいほどなだらかに目標値に近づき、オーバーシュートが発生しにくくなります。設定範囲は0.01 ~ 100.00です。比例係数の詳細は次を参照してください。 |
積分時間 |
積分を行う間隔を設定します。設定範囲は0.00 ~ 3000.00(S)です。積分時間の詳細は次を参照してください。 |
微分時間 |
微分を行う間隔を設定します。設定範囲は0.00~3000.00(S)です。微分時間の詳細は次を参照してください。 |
処理無効範囲 |
PID演算を行わない範囲を設定します。設定範囲に入ったときの偏差は「0」になり、目標値からの±処理無効範囲部分を示します。設定範囲は0 ~(出力最大値 -出力最小値) / 2です。 |
バイアス |
出力値にあらかじめ、ここで設定した値を付加して動作させます。設定範囲は出力最小値~出力最大値です。 |
サンプリング 時間 |
PID演算を行うサンプリング周期を設定します。ただし、この周期はスキャンタイムに影響され、設定した周期後のスキャンでPID演算は処理されます。設定範囲は演算周期 ~ 65535(ms)です。 |
比例動作とは、偏差(目標値と現在値の差)に比例した操作量(出力値)を得る動作です。比例動作における、偏差(E)と操作量(CV)の変化の関係は次の数式になります。
CV = KP x E
(KPは、比例定数で比例ゲインといいます。)
偏差が一定の場合の比例動作は、次のようになります。
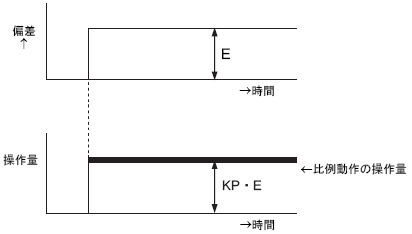
操作量は、0~4095(初期値)の間で変化し、KPが大きくなるにつれて同一偏差に対する操作量が大きくなり、修正動作は強くなります。また、比例動作では、オフセット(残留偏差)が生じます。
積分動作とは、偏差(目標値と現在値の差)がある場合、その偏差をなくすように連続的に操作量(出力値)を変化させる動作です。比例動作で生じるオフセットをなくすことができます。
積分動作で、偏差が生じてから積分動作の操作量が比例動作の操作量になるまでの時間を積分時間といい、TIで示します。TIを小さくすると、積分動作が強くなります。
偏差が一定の場合の積分動作は、次のようになります。
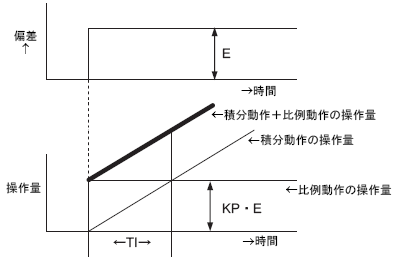
積分動作は、比例動作と組み合わせた「PI動作」や比例動作と微分動作と組み合わせた「PID動作」として使用します。積分動作だけでの使用はできません。
微分動作とは、偏差(目標値と現在値の差)がある場合、その偏差をなくすようにその偏差に比例した操作量(出力値)を加える動作です。外の乱れなどで制御対象が大きく変動することを防ぐことができます。
微分動作で、偏差が生じてから微分動作の操作量が比例動作の操作量になるまでの時間を微分時間といい、TDで示します。
TDを大きくすると、微分動作が強くなります。
偏差が一定の場合の微分動作は、次のようになります。
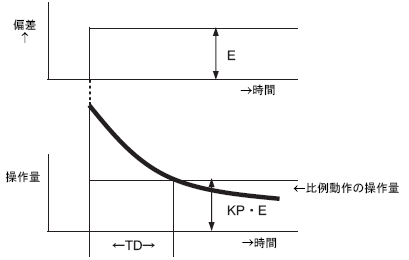
微分動作は、比例動作と組み合わせた「PD動作」や比例動作と積分動作と組み合わせた「PID動作」として使用します。微分動作だけでの使用はできません。